上篇文章我们分析了 Inductor 中 fuse_nodes 的整体架构和工作流程(详见:PyTorch Inductor 中 fuse_nodes 融合流程深度解析)。本篇我们将聚焦其中一个有趣的配置项 speedup_by_fusion,从开启方式、运行机制、实际日志到局限性展开讨论。
1. 如何开启 speedup_by_fusion
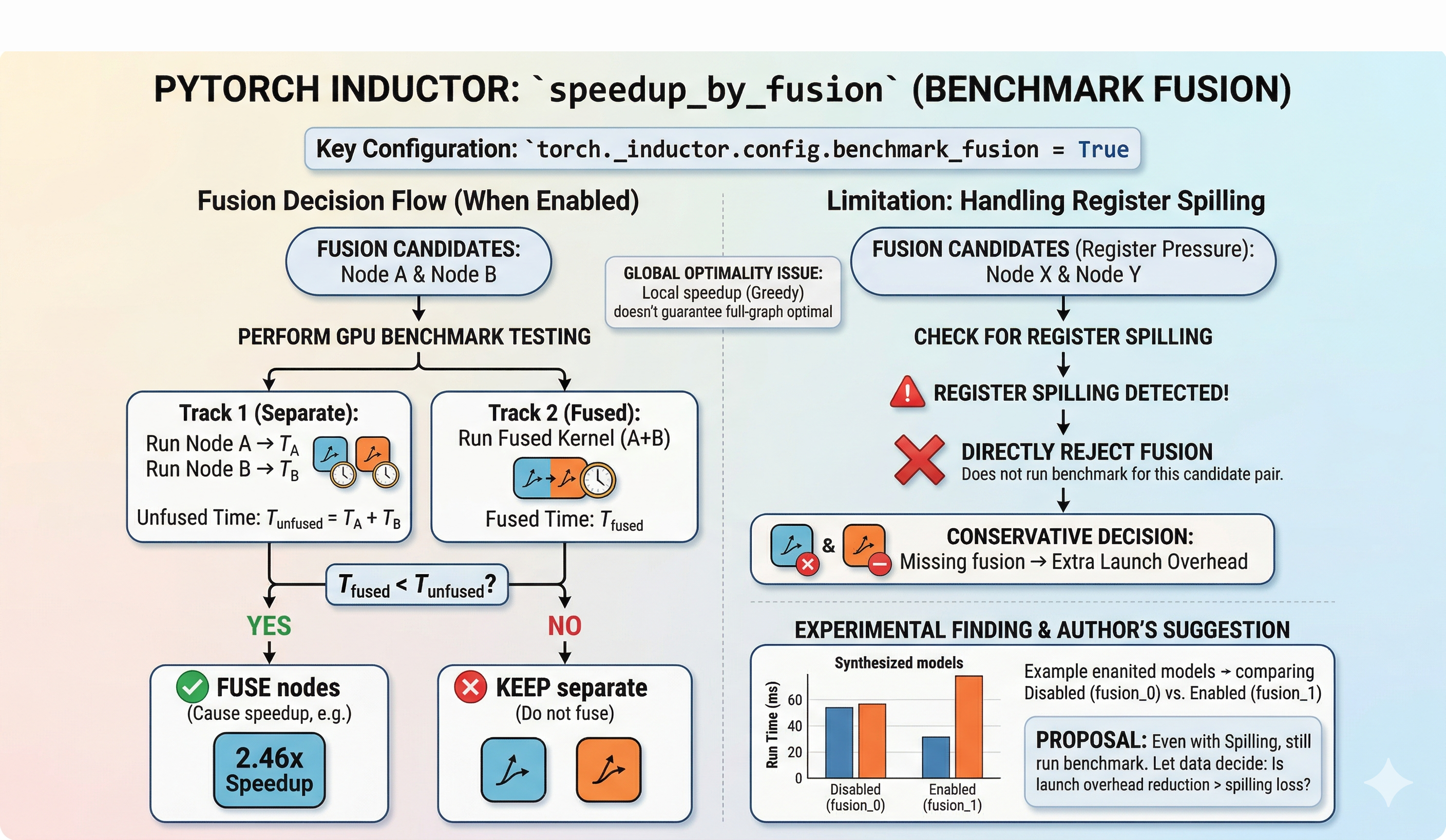
speedup_by_fusion 是 torch._inductor.config 中的一个配置项。开启后,Inductor 在融合决策阶段会通过实际 benchmark 来判断两个算子融合后是否真的更快,而不仅仅依赖启发式打分。
可以通过以下方式开启:
import torch._inductor.config as config
config.benchmark_fusion = True
或者通过 torch.compile 的 options 参数传入:
compiled_model = torch.compile(model, backend="inductor", options={"benchmark_fusion": True})
2. 开启后做了什么
在默认模式下,Inductor 的融合决策完全基于启发式规则——通过 can_fuse 检查合法性,通过 score_fusion 打分排序,然后贪心地执行融合。
开启 benchmark_fusion 后,流程增加了一个关键步骤:对候选融合对进行实际 GPU benchmark。具体来说,系统会分别计时:
- 两个算子独立运行的总耗时
- 两个算子融合后作为一个 kernel 的耗时
只有当融合后确实更快时,才执行该融合。
3. 日志中的 Speedup 示例
开启后,在 Inductor 的 fusion 日志中可以看到类似如下的输出:
V0312 02:40:20.816000 3795204 scheduler.py:4396] [0/0] [__fusion]
can fuse (benchmark): fusing OrderedSet(['buf17']) with OrderedSet(['buf18'])
cause 2.462x speedup
这条日志表明 buf17 和 buf18 经过实际 benchmark 测试后,融合带来了 2.462 倍的加速,因此决定执行融合。
4. 局限性与 Register Spilling 问题
开启 speedup_by_fusion 虽然看起来更加”科学”,但实际使用中存在两个值得讨论的问题。
4.1 贪心融合的全局最优性问题
benchmark 测试的是两个算子融合前后的性能对比。但这个局部最优并不一定意味着全图在 GPU 上运行时也是最优的。贪心算法的固有缺陷在于:局部最优决策的累积不一定导向全局最优。
4.2 Register Spilling 导致的融合拒绝
在实际 benchmark 过程中,可能出现融合后的 kernel 因为 register spilling 而被拒绝融合的情况。日志示例如下:
V0312 02:40:31.500000 3795204 scheduler.py:1776] [0/0] [__fusion]
cannot fuse op1_op6_op11_op2_op7_op12 with op16_op17_op18:
register spilling of the fused kernel
什么是 Register Spilling? GPU 的每个线程有有限数量的寄存器。当一个 kernel 需要的寄存器数量超出硬件限制时,多余的变量会被”溢出”到较慢的 local memory 中。这就是 register spilling。它会导致显著的性能下降,因为 local memory 的访问延迟远高于寄存器访问。
当前实现中,一旦检测到 register spilling,就直接拒绝该融合,不再进一步评估。这带来了一个重要疑问:
即使发生了 register spilling,融合带来的 launch overhead 减少是否有可能超过 spilling 的性能损失?
换句话说,当前的实现可能因为 register spilling 而过于保守地拒绝了一些实际上有益的融合。
5. 实验数据
为验证上述假设,我在 RTX 5090 上基于一个合成 workload 做了对比实验。实验环境为 PyTorch 2.10.0+cu128。
- benchmark_fusion_0:关闭
benchmark_fusion(纯启发式) - benchmark_fusion_1:开启
benchmark_fusion
模型 20:HubConflictRoundOpt
该模型具有共享 hub tensor 和多分支竞争结构,包含多种 reduction 和 transcendental 运算。
| 指标 | 关闭 (fusion_0) | 开启 (fusion_1) | 变化 |
|---|---|---|---|
| 编译后运行时间 (ms) | 0.817 | 0.964 | +17.9% (变慢) |
| Eager 运行时间 (ms) | 79.36 | 60.10 | -24.3% |
| 编译加速比 vs Eager | 97.1x | 62.4x | -35.8% |
| FX 编译耗时 (s) | 7.22 | 20.00 | +176.8% |
| 融合轮数 | 3 | 2 | -1 |
| 节点缩减数 | 67 | 62 | -5 |
| Benchmark 决策次数 | 0 | 62 | +62 |
数据分析
查看该 workload 的完整日志后可以确认:所有少融合的节点,都是因为开启 benchmark 后检测到 register spilling 而被拒绝的。
在这个模型上,开启 benchmark_fusion 后,融合轮数减少、节点缩减数减少,最终编译后运行时间反而变慢了 17.9%。这说明在这个 workload 中,因 register spilling 而少融合节点所带来的额外 launch overhead,很可能比融合后可能出现的 spilling 成本更大。
更值得注意的是,开启 benchmark 后 FX 编译时间从 7.22s 增加到 20.00s,增幅约 176.8%,因为每个候选对都需要实际在 GPU 上跑一遍。
6. 思考
使用真实 benchmark 来决定两个节点是否应该融合,这无疑是一个聪明的做法——它直接用数据说话,避免了启发式规则可能的误判。
但当前对 register spilling 的处理方式过于简单粗暴:一旦检测到 spilling,直接拒绝融合,不再进行 benchmark 评估。 即使只看这一个 workload,这种策略也可能过于保守。
个人认为,即使出现了 register spilling,也应该继续运行 benchmark,让实际的运行数据来决定是否融合。毕竟 register spilling 的影响程度取决于溢出量和访问模式,并非所有 spilling 都会导致不可接受的性能下降。
当然,我对 benchmark 的具体实现方式了解有限,也许存在更好的方法来判断融合前后的性能差异。欢迎大家通过邮件与我讨论。
]]>